Webots翻譯 <<
Previous Next >> TOPIC 0
傳感器
相機傳感器
對於大多數應用程序而言,添加通用的Camera節點就足夠了。 通用相機是可自定義的(分辨率,視野,噪點等),默認情況下包括變焦和聚焦機制。 提供特殊效果,例如運動模糊,各種噪聲模型,鏡頭畸變和使用球形投影。除了添加通用的Camera節點外,Webot中還提供了一些預定義的Camera模型。
智能相機
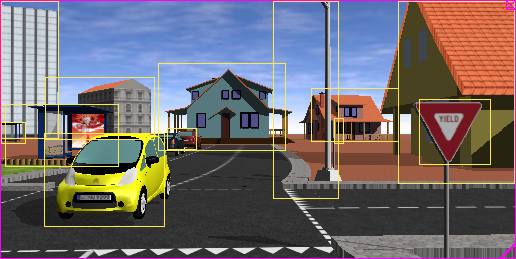
如果將“識別”節點添加到相機,則相機不僅可以返回圖像,而且還可以返回相機圖像中檢測到的所有對象及其大小和位置。 因此,模擬像是Mobileye之類的智能相機非常容易。
MultiSense S21
MultiSense S21是基於立體相機的距離傳感器。我們的傳感器模型包括多個Webots設備。內部的IntertialUnit設備用於獲取設備的側傾角,俯仰角和偏航角。 可以使用Webots相機獨立檢索立體相機的左右RGB圖像。 或者,可以在MultiSense S21設備的中央啟用RGB相機和RangeFinder設備。 存在這兩個“元”設備以模仿由真實設備生成的3D彩色點的雲。
可以使用下表從MultiSenseS21.name字段計算用於從控制器檢索設備的內部設備名稱:
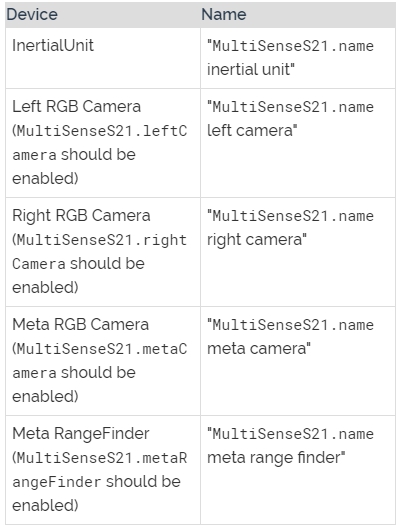

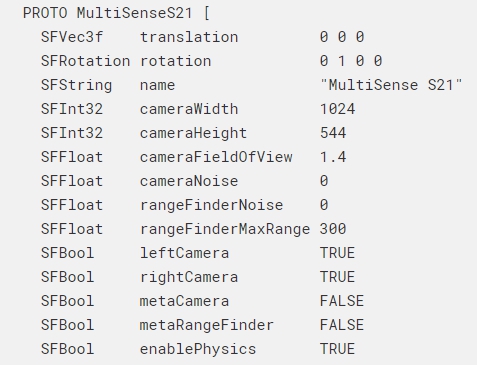
名稱字段定義MultiSenseS21名稱,並用於計算內部設備名稱(請參閱此表)。
cameraWidth和cameraHeight字段指定所有內部渲染設備(即Cameras和RangeFinder)的分辨率。
cameraFieldOfView字段指定所有內部渲染設備的水平視場。
cameraNoise字段指定所有內部渲染設備的噪聲(請參閱Camera.noise)。
rangeFinderNoise字段指定內部元RangeFinder的噪聲(請參閱RangeFinder.noise)。
rangeFinderMaxRange字段指定內部元RangeFinder的最大範圍(請參閱RangeFinder.maxRange)。
leftCamera,rightCamera,metaCamera和metaRangeFinder字段允許啟用相應的內部渲染設備。
enablePhysics字段指定傳感器是否應該受到物理影響(質量= 1.5 [kg])。
距離傳感器
對於大多數應用程序而言,添加通用的DistanceSensor節點就足夠了,因為它們是可自定義的(分辨率,lookupTable,光圈等)。此外,Webot中提供了一些預定義的商業化模型,例如某些紅外傳感器。
Sharp GP2D120

Sharp GP2D120是一款具有集成信號處理和模擬電壓輸出的測距傳感器。 該設備輸出與檢測距離相對應的電壓。該型號具有以下規格:
有效範圍:4 to 30 [cm]
輸出類型:類比
響應時間:39 [ms]
啟動延遲:44 [ms]
平均消耗:33 [mA]
原型SharpGP2D120 {
SFVec3f轉換0 0 0
旋轉旋轉0 1 0 0
SFString名稱“夏普的紅外傳感器GP2D120”
SFString模型“ GP2D120”
根據數據表中的特徵,DistanceSensor的lookupTable字段已經實現。
wb_distance_sensor_get_value函數返回測量的電壓/強度。 要轉換這些值,請使用以下公式:
- Convert meters to voltage:
y(x) = 0.5131*x^(-0.5735)-0.6143
- Convert voltage to meters:
y(x) = 0.1594*x^(-0.8533)-0.02916
Sharp GP2Y0A02YK0F

Sharp GP2Y0A02YK0F是一種測距傳感器單元,由PSD(位置敏感檢測器),IR-LED(紅外發光二極管)和信號處理電路的集成組合組成。 由於採用三角測量法,物體的反射率,環境溫度和工作持續時間的變化不容易影響距離檢測。 該設備輸出與檢測距離相對應的電壓。 因此,該傳感器也可以用作接近傳感器。
該型號具有以下規格:
有效範圍:20至150 [cm]
輸出類型:類比
響應時間:33 [ms]
啟動延遲:50 [ms]
平均消耗:33 [mA]
原型SharpGP2Y0A02YK0F {
SFVec3f轉換0 0 0
旋轉旋轉0 1 0 0
SFString名稱“夏普的紅外傳感器GP2Y0A02YK0F”
根據數據表中的特徵,DistanceSensor的lookupTable字段已經實現。wb_distance_sensor_get_value函數返回測量的電壓/強度。 要轉換這些值,請使用以下公式:
- Convert meters to voltage:
y(x) = 1.784*x^(-0.4215)-1.11
- Convert voltage to meters:
y(x) = 0.7611*x^(-0.9313)-0.1252
Sharp GP2Y0A41SK0F

Sharp GP2Y0A41SK0F是一種測距傳感器單元,由PSD(位置敏感檢測器),IR-LED(紅外發光二極管)和信號處理電路的集成組合組成。 由於採用三角測量法,物體的反射率,環境溫度和工作持續時間的變化不容易影響距離檢測。 該設備輸出與檢測距離相對應的電壓。 因此,該傳感器也可以用作接近傳感器。
該型號具有以下規格:
有效範圍:4到30 [cm]
輸出類型:類比
響應時間:16.5 [ms]
啟動延遲:26 [ms]
平均消耗:12 [mA]
原型SharpGP2Y0A41SK0F {
SFVec3f轉換0 0 0
旋轉旋轉0 1 0 0
SFString名稱“夏普的紅外傳感器GP2Y0A41SK0F”
根據數據表中的特徵,DistanceSensor的lookupTable字段已經實現。wb_distance_sensor_get_value函數返回測量的電壓/強度。 要轉換這些值,請使用以下公式:
- Convert meters to voltage:
y(x) = 0.5131*x^(-0.5735)-0.6143
- Convert voltage to meters:
y(x) = 0.1594*x^(-0.8533)-0.02916
Sharp GP2Y0A710K0F

Sharp GP2Y0A710K0F是一種測距傳感器單元,由PSD(位置敏感檢測器),IR-LED(紅外發光二極管)和信號處理電路的集成組合組成。 由於採用三角測量法,物體的反射率,環境溫度和工作持續時間的變化不容易影響距離檢測。 該設備輸出與檢測距離相對應的電壓。 因此,該傳感器也可以用作接近傳感器。
該型號具有以下規格:
有效範圍:100至550 [cm]
輸出類型:類比
響應時間:21 [ms]
啟動延遲:26 [ms]
平均消耗:30 [mA]
原型SharpGP2Y0A710K0F {
SFVec3f轉換0 0 0
旋轉旋轉0 1 0 0
SFString名稱“夏普的紅外傳感器GP2Y0A710K0F”
根據數據表中的特徵,DistanceSensor的lookupTable字段已經實現。wb_distance_sensor_get_value函數返回測量的電壓/強度。 要轉換這些值,請使用以下公式:
- Convert meters to voltage:
y(x) = 1.962*x^(-0.5214)+0.4926
- Convert voltage to meters:
y(x) = 20.24*x^(-4.76)+0.6632
Webots翻譯 <<
Previous Next >> TOPIC 0